Download Performance Analysis of Self-Excited Induction Generators Driven by Small Hydro Turbine and more Thesis Engineering in PDF only on Docsity!
Table of Contents
- CHAPTER 1..................................................................................................................
- INTRODUCTION.........................................................................................................
- 1.1 Overview of the Study..........................................................................................
- 1.2 Statement of the Problem.....................................................................................
- 1.3 Objectives of the Study........................................................................................
- 1.4 Significance of the Study......................................................................................
- 1.5 Scope and Limitation............................................................................................
- CHAPTER 2..................................................................................................................
- REVIEW OF RELATED LITERATURE.....................................................................
- 2.1 Introduction..............................................................................................................
- 2.2 Electrical Machines..................................................................................................
- 2.2.1 DC Motors.........................................................................................................
- 2.2.1.1 Three main components of DC Motors......................................................
- 2.2.1.2 Types of DC Motors:..................................................................................
- 2.2.2 AC Motors.........................................................................................................
- 2.2.3 Special Machines...............................................................................................
- 2.2.3.1 BLDC Motor...............................................................................................
- 2.2.3.2 PMSM Motor..............................................................................................
- 2.2.3.3 SR Motor.....................................................................................................
- 2.3 Three Phase Induction Machine.............................................................................
- 2.3.1 Synchronous speed..........................................................................................
- 2.3.2 Slip...................................................................................................................
- 2.3.3 Losses and the Power Flow Diagram..............................................................
- 2.3.4 Induction Motor Torque - Speed Characteristics............................................
- 2.3.5 Starting Induction Motors................................................................................
- 2.3.6 The Equivalent Circuit of an Induction Motor................................................
- 2.4 Induction Motor as Generator................................................................................
- 2.4.1 Advantages and Disadvantages of Induction Generators................................
- 2.4.2 Induction Machine Construction and Operation.............................................
- 2.5 Classification of Induction Generators..................................................................
- 2.5.1 Depending upon the Basis of Rotor Construction...........................................
- 2.5.1.1 Squirrel cage rotor....................................................................................
- 2.5.1.2 Wound rotor..............................................................................................
- schemes..................................................................................................................... 2.5.2 Depending upon the prime movers used and their locations, generating
- 2.5.2.1 Constant-Speed Constant Frequency........................................................
- 2.5.2.2 Variable-Speed Constant Frequency........................................................
- 2.5.2.3 Variable-Speed Variable Frequency.........................................................
- 2.5.3 Depending on the basis of excitement process................................................
- 2.5.3.1 Grid Connected Induction generator.........................................................
- 2.5.3.2 Self-excited Induction Generator..............................................................
- 2.6 Process of Self-Excitation and Voltage Buildup in SEIG.....................................
- 2.7 Generator Modeling............................................................................................... - 2.7.1 D–q Reference Model.................................................................................. - 2.7.2 Impedance-Based Model............................................................................. - 2.7.3 Admittance-Based Model............................................................................ - 2.7.4 Operational Circuit-Based Model................................................................ - 2.7.5 Power Equations-Based Model.................................................................... - 2.8 Electronic Load Controller.............................................................................
- METHODOLOGY......................................................................................................
- 3.1 Introduction........................................................................................................
- 3.2 Data Gathering....................................................................................................
- 3.2.1 Selection of the Induction Machine.............................................................
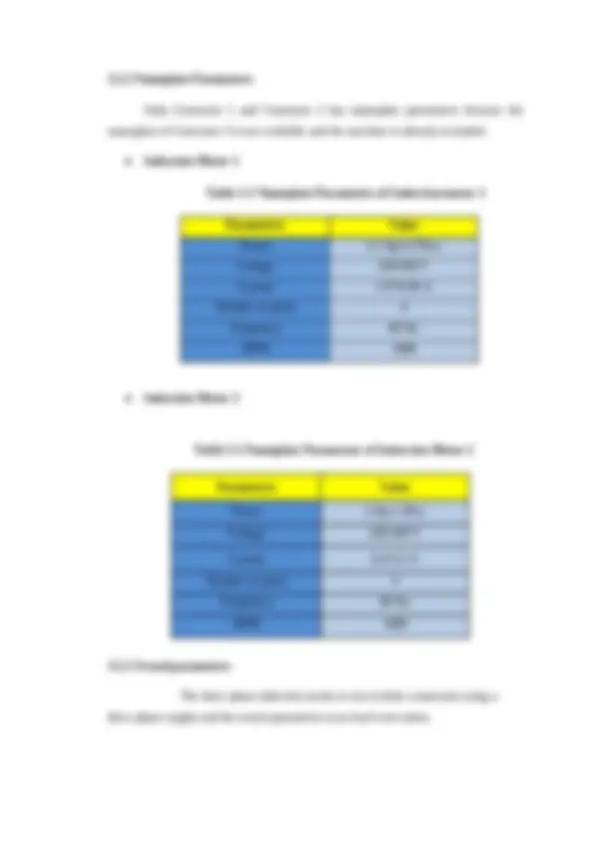
- 3.2.2 Nameplate Parameters.................................................................................
- 3.2.3 Actual parameters........................................................................................
- 3.3.2 Load Test as Motor......................................................................................
- 3.4 Single Phase Output from a Three Phase Machine............................................
- 3.5 Test Experiments................................................................................................
- 3.5.2 Power Output Test.......................................................................................
- CHAPTER 4................................................................................................................
- RESULTS AND DISCUSSIONS................................................................................
- 4.1 Introduction........................................................................................................
- 4.2 Calculated Value of Capacitance and the actual Value Used.............................
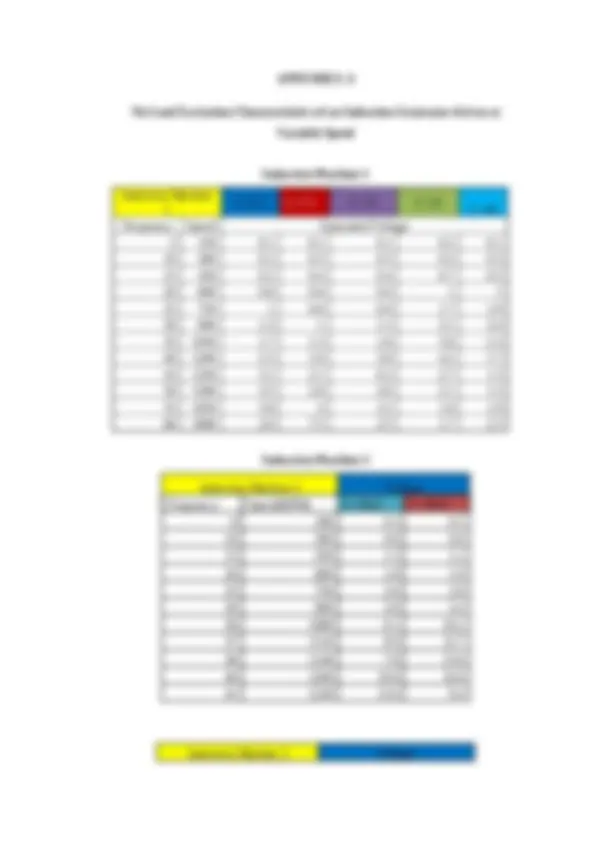
- Speed........................................................................................................................ 4.3 No Load Excitation Characteristics of an Induction Generator driven at Variable
- 4.4 Generator Voltage Buildup.................................................................................
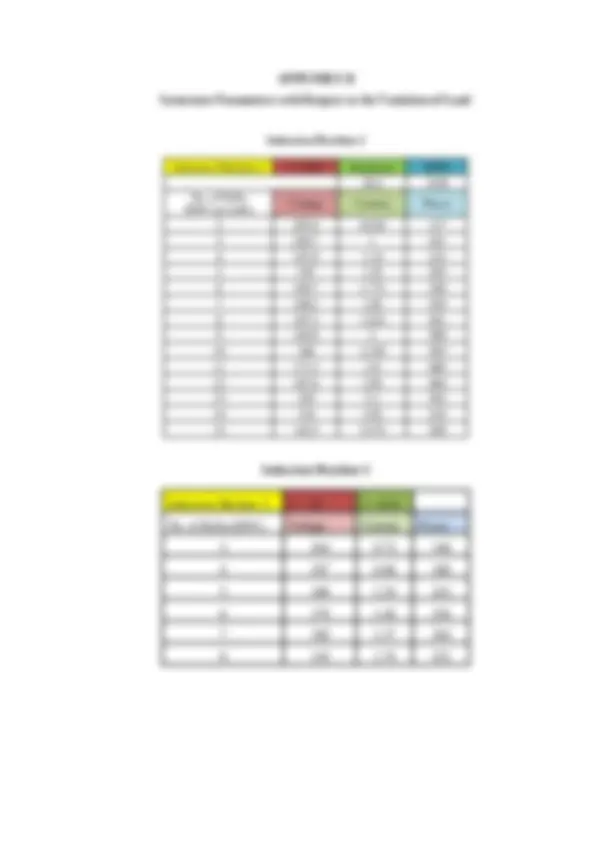
- Constant Speed......................................................................................................... 4.5 Generator Characteristics with Respect to the Load Connected Driven at
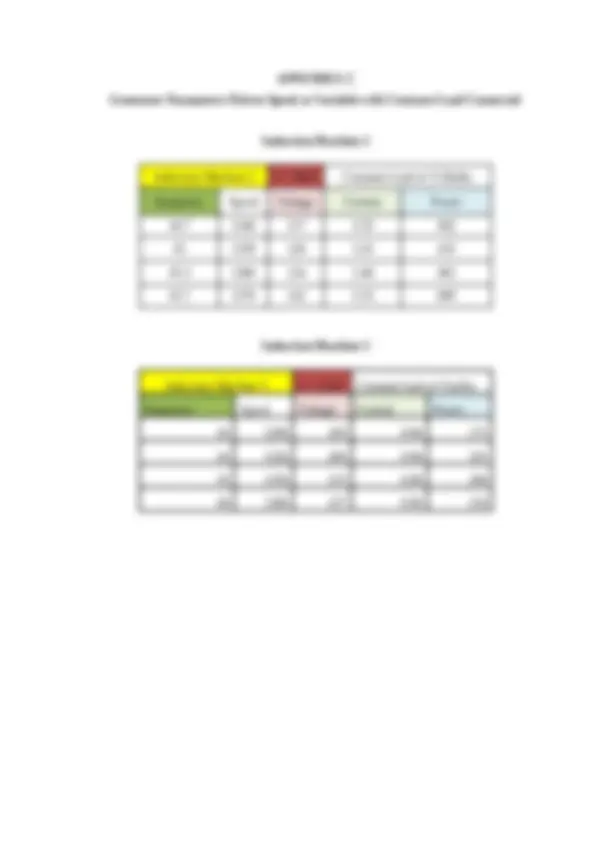
- Connected................................................................................................................. 4.6 Generator Characteristics Driven at Variable Speed with Constant Load
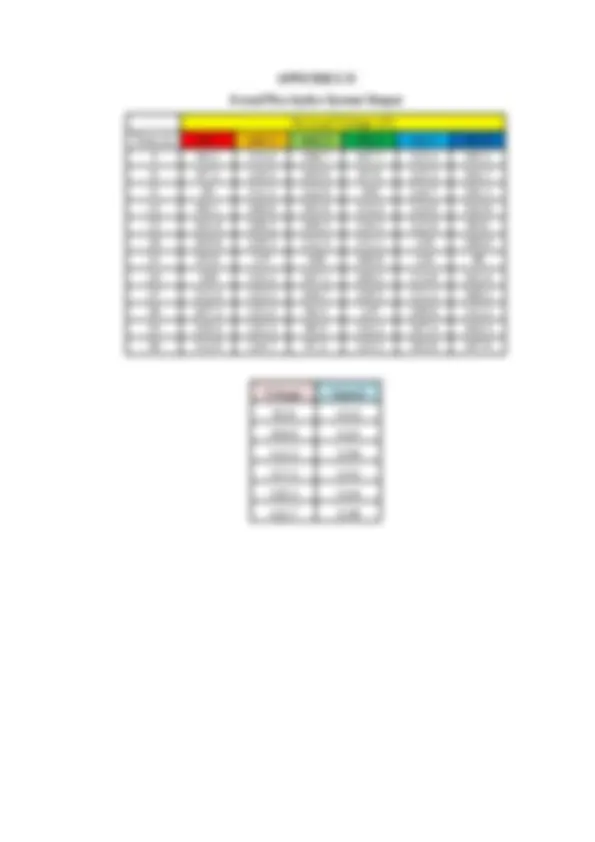
- 4.7 Actual Generator Performance Connected with Pico-hydro System.................
- REFFERENCES..........................................................................................................
- APPENDEX A.............................................................................................................
- APPENDEX B.............................................................................................................
- Generator Parameters with Respect to the Variation of Load.....................................
- APPENDEX C.............................................................................................................
- Generator Parameters Driven Speed at Variable with Constant Load Connected.......
- APPENDEX D.............................................................................................................
- Actual Pico-hydro System Output...............................................................................
- APPENDEX E.............................................................................................................
- Bench Testing..............................................................................................................
- APPENDEX G.............................................................................................................
- Site Testing..................................................................................................................
- Figure 2-1 Constructional View of DC Motor............................................................... List of Figures
- Figure 2-2 Shunt Wound DC Motor..............................................................................
- Figure 2- 3 Series Wound DC Motor.............................................................................
- Figure 2- 4 AC Motor....................................................................................................
- Figure 2- 5 BLDC Motor...............................................................................................
- Figure 2- 6 SR Motor...................................................................................................
- Figure 2-7 Three Induction Motor...............................................................................
- Figure 2-8 Power Flow Diagram of an Induction Motor.............................................
- Figure 2- 9 Induction Motor Torque - Speed Curve....................................................
- Figure 2- 10 Transformer Model of an Induction Motor.............................................
- Figure 2-11 Mechanical Parts of an Induction Motor..................................................
- Figure 2- 12 Squirrel Cage Induction Motor................................................................
- Figure 2-13 Grid Connected Induction Generator.......................................................
- Figure 2-14 Self Exited Induction Generator...............................................................
- Figure 2-15 Highly Simplified induction generator equivalent circuit........................
- Constant Speed............................................................................................................. Figure 2- 16 No Load Excitation Characteristics for an Induction Generator Driven at
- Figure 3- 1 Induction Motor 1 (0.5 hp)........................................................................
- Figure 3- 2 Induction Motor 2 (2 hp)...........................................................................
- Figure 3- 3 Induction Motor 3 (1 hp)...........................................................................
- Figure 3- 4 No load test as motor equivalent circuit....................................................
- Figure 3- 5 Load Test as Motor....................................................................................
- connection.................................................................................................................... Figure 3- 6 Single phase generation from a three phase machine using the 'C-2C"
- Figure 3- 7 Test experiment set-up..............................................................................
- Figure 3- 8 No load test as generator...........................................................................
- Figure 3- 9 Load test as generator................................................................................
- Figure 4- 1 No load characteristics of Induction Machine 1........................................
- Figure 4- 2 No Load Characteristics of Induction Machine 2.....................................
- Figure 4-3 No load characteristics of Induction Machine 3.........................................
- Figure 4-4 Starting of the induction generator.............................................................
- Figure 4-5 Stable No Load Voltage Output.................................................................
- Figure 4-6 Stator Voltage Disturbance when C is removed........................................
Figure 4-7 Variation of Voltage with respect to the load connected of Induction Machine 2..................................................................................................................... 46 Figure 4-8 Variation of Voltage with respect to the load connected of Induction Machine 3..................................................................................................................... 47 Figure 4-9 Variation of Load vs. Load Current of Induction Machine 2..................... 47 Figure 4-10 Variation of Load vs. Load Current of Induction Machine 3................... 48 Figure 4-11 Generated Voltage vs. Load current at variable loads connected to Machine 2..................................................................................................................... 49 Figure 4-12 Generated Voltage vs. Load current at variable loads connected to Machine 3..................................................................................................................... 49 Figure 4- 13 Variation of speed vs. generated voltage with constant load connected to Induction Machine 2.................................................................................................... 50 Figure 4-14 Variation of speed vs. stator voltage with constant load connected to Induction Machine 3.................................................................................................... 50 Figure 4-15 Variation of speed vs. load current of Induction Machine 2.................... 51 Figure 4-16 Load Current vs. Output Power................................................................ 52 Figure 4-17 Variation of Speed Vs. Output Power with constant load connected...... 52 Figure 4-18 Variation of Voltage at No Load.............................................................. 53 Figure 4- 19 Variation of Speed vs. Generated Voltage at Actual operation of Pico- hydro system................................................................................................................ 54 List of Tables Table 3-1 Nameplate Parameters of Induction motor 1............................................... 32 Table 3-2 Nameplate Parameters of Induction Motor 2............................................... 32 Table 3-3 Actual parameters taken from no load motoring test................................... 33 Table 4-1 Calculated and actual value of capacitor..................................................... 41
CHAPTER 1
INTRODUCTION
1.1 Overview of the Study Electrical Energy holds a very important role in our everyday life nd in progress towards development. In recent times, there has been a considerable upsurge in exploring new ways to supply energy from renewable energy sources. Hydro energy is one of the most important and promising sources of renewable energy all over the world. It is nonpolluting and economically viable and has very large potential. Small hydro systems are usually located in remote areas where grid supply may not be available. Otherwise, the plants can operate in stand-alone mode. The conversion to electrical power occurs in the generator that’s why it is very important to use the right generator. Self-excited induction generators(SEIG) has many advantage compared to synchronous generator such as rugged construction, absence of dc power supply for excitation, less maintenance cost, good over speed capability and self protection against faults. The voltage output of a self excited induction generator is not fixed but depends on many factors such as generator parameters, excitation capacitor and load. This makes the make the steady state analysis more difficult. Major drawbacks of SEIG are reactive power consumption, its relatively poor voltage and frequency regulation under varying prime mover speed, excitation capacitor and load characteristics. Therefore methods to analyze the performance of such machines are of considerable practical interest. This paper analyzes the operation of such a system applied to a three phase, 4 - pole, delta connected, squirrel cage self-excited induction generators driven by a small hydro turbine. There were three induction machines used in this research study. Calculations and tests will be performed to determine the performance characteristics of the said induction generators.
1.2 Statement of the Problem Nowadays many technologies were developed and most of these technologies use electrical power to operate. It is always a challenge to us to find solutions to our problem regarding power crises. One of the best solutions is to make use of the renewable energy as a source of power which is less costly and does not produce pollution such as hydro power which has high potential to generate electricity. The conversion to electrical power occurs in the generator that’s why it is very important to use the right generator. Induction generators has many advantage compared to synchronous generator such as rugged construction, absence of dc power supply for excitation, less maintenance cost, good over speed capability and self protection against faults. The voltage output of a self excited induction generator is not fixed but depends on many factors such as generator parameters, excitation capacitor and load. Therefore methods to analyze the performance of such machines are of considerable practical interest. 1.3 Objectives of the Study The paper performs tests and simulation of self-excited induction generator and the objectives are the following: To be able to calculate the proper values of the capacitances of the Induction Generator To be able to characterize the Induction Generator To apply theories and operation of self excited induction generator in the actual operation of Pico-hydro system. 1.4 Significance of the Study The use of motors as generators is now well proven and promises to be an important element in establishing self-sustaining small scale hydropower in developing countries. Induction generators are increasing being used in remote areas to generate electrical power from wind or mini-hydro turbines because of their many advantageous features over the synchronous generators.
CHAPTER 2
REVIEW OF RELATED LITERATURE
2.1 Introduction The increasing rate of the depletion of conventional energy sources has given rise to an increased emphasis on renewable energy sources such as wind, mini/micro- hydro, etc. Generation of electrical energy mainly so far has been from thermal, nuclear, and hydro plants. They have continuously degraded the environmental conditions. An increasing rate of the depletion of conventional energy sources and the degradation of environmental conditions has given rise to an increased emphasis on renewable energy sources, particularly after the increases in fuel prices during the 1970s [1]. Use of an induction machine as a generator is becoming more and more popular for the renewable sources. Reactive power consumption and poor voltage regulation under varying speed are the major drawbacks of the induction generators, but the development of static power converters has facilitated the control of the output voltage of induction generators. 2.2 Electrical Machines An electrical machine is a device that can convert either mechanical energy to electrical energy or electrical energy to mechanical energy. When such a device is used to convert mechanical energy to electrical energy, it is called a generator. When it converts electrical energy to mechanical energy, it is called a motor. Since any given electrical machine can convert power in either direction, any machine can be used as either a generator or a motor. Almost all practical motors and generators convert energy from one form to another through the action of a magnetic field [2]. Electrical machines are divided onto dc machines and ac machines. In this chapter we discussed about different types of electrical motors, 3-Φ induction machines (their classification, construction and principle of operation).
2.2.1 DC Motors Direct current motors use a dc supply for their operation. It converts dc power to mechanical power. They are mostly used in steel mills, mines. There were several reasons for the continued popularity of dc motors. One was that dc power systems are still common in cars, trucks, and aircraft. When a vehicle has a dc power system, it makes sense to consider using dc motors. Another application for dc motors was a situation in which wide variations in speed are needed. Before the widespread use of power electronic rectifier-inverters, dc motors were unexcelled in speed control applications. Even if no dc power source were available, solid-state rectifier and chopper circuits were used to create the necessary dc power, and dc motors were used to provide the desired speed control [2]. The construction of a dc motor is given below: 2.2.1.1 Three main components of DC Motors 2.2.1.1.1 Field system It consists of yoke, field windings, and field poles. The DC motor field poles are stationary and an armature that turns on bearings in the space between the field poles. A simple DC motor has two field poles: a north pole and a south pole. The magnetic lines of force extend across the opening between the poles from north to south. For larger or more complex motors there are one or more electromagnets. These electromagnets receive electricity from an outside power source and serve as the field structure. The main work of these components is to produce and carry the working flux. The yoke is laminated to reduce the eddy current loss.
using DC motors is that their torque-speed characteristic has, historically, been easier to tailor than that of all AC motor categories. This is why most traction and servo motors have been DC machines. 2.2.1.2 Types of DC Motors: 2.2.1.2.1 Shunt-wound motor In shunt wound motor, field winding is connected in parallel with the armature such that the field winding current and armature current are not same. Figure 2- 2 Shunt Wound DC Motor 2.2.1.2.2 Series-wound motor In series wound motor, field winding is connected in series with the armature such that the series field winding carries the armature current. Figure 2- 3 Series Wound DC Motor
2.2.1.2.3 Compound-wound motor Compound wound motor has two field windings; one connected in parallel with the armature and the other in series with it. 2.2.2 AC Motors AC Motors use an electric current which reverses its direction at regular intervals. An AC motor has two basic electrical parts: a stator and a rotor. The stator is in the stationary electrical component. The rotor is the rotating electrical component, which rotates the motor shaft. AC motor is shown in the figure. Figure 2- 4 AC Motor [3] There are two types of AC motors synchronous motor and asynchronous motor or induction motor. The synchronous motors are doubly excited electrical machines as they require both dc and ac supply. The rotor rotates at synchronous speed. These are for delivering mechanical power and improving system power factor. The synchronous motors have no self starting torque so external means used to start it. The induction motors require no dc excitation, hence called singly excited ac machines. They have self starting torque. Speed control of induction motors is possible.
applications in mining areas and where the rotor must be held for longer period of time. SR Motor is shown in figure: Figure 2- 6 SR Motor [3] 2.3 Three Phase Induction Machine An induction or asynchronous motor is an AC electric motor in which the electric current in the rotor needed to produce torque is obtained by electromagnetic induction from the magnetic field of the stator winding. An induction motor therefore does not require mechanical commutation, separate- excitation or self-excitation for all or part of the energy transferred from stator to rotor, as in universal, DC and large synchronous motors. Figure 2- 7 Three Induction Motor 2.3.1 Synchronous speed An AC motor's synchronous speed, , is the rotation rate of the stator's magnetic field, which is expressed in revolutions per minute as
(RPM),
where is the motor supply's frequency in hertz and is the number of magnetic poles. 2.3.2 Slip Slip, , is defined as the difference between synchronous speed and operating speed, at the same frequency, expressed in rpm or in percent or ratio of synchronous speed. Thus where is stator electrical speed, is rotor mechanical speed. Slip, which varies from zero at synchronous speed and 1 when the rotor is at rest, determines the motor's torque. Since the short-circuited rotor windings have small resistance, a small slip induces a large current in the rotor and produces large torque. At full rated load, slip varies from more than 5% for small or special purpose motors to less than 1% for large motors. These speed variations can cause load-sharing problems when differently sized motors are mechanically connected. Various methods are available to reduce slip, VFDs often offering the best solution 2.3.3 Losses and the Power Flow Diagram An induction-motor can be basically described as rotating transformer. Its input is a three phase system of voltages and currents. The secondary windings in an induction motor (the rotor) are shorted out, so no electrical output exists from normal induction motor. Instead, the output is mechanical.
Figure 2- 9 Induction Motor Torque - Speed Curve The torque speed curve is approximately symmetric about synchronous speed. (The magnitude of the peak negative torque is larger than the positive torque, the difference being a function of stator resistance) 2.3.5 Starting Induction Motors Induction motors do not present the types of starting problems that synchronous motors do. In many cases, induction motors can be started by simply connecting them to the power line. However, there are sometimes good reasons for not doing this. For example, the starting current required may cause such a dip in the power system voltage that across-the-line starting is not acceptable. For wound-rotor induction motors, starting can be achieved at relatively low currents by inserting extra resistance in the rotor circuit during starting. This extra resistance not only increases the starting torque but also reduces the starting current. For cage induction motors, the starting current can vary widely depending primarily on the motor's rated power and on the effective rotor resistance at starting conditions. IL = Sstart
√ 3 V T
If necessary, the starting current of an induction motor may be reduced by a starting circuit. However, if this is done, it will also reduce the starting torque of the motor. 2.3.6 The Equivalent Circuit of an Induction Motor An induction motor relies for its operation on the induction of voltages and currents in its rotor circuit from the stator circuit (transformer action). Because the induction of voltages and currents in the rotor circuit of an induction motor is essentially a transformer operation, the equivalent circuit of an induction motor will turn out to be very similar to the equivalent circuit of a transformer. An induction motor is called a singly excited machine (as opposed to a doubly excited synchronous machine), since power is supplied to only the stator circuit. Because an induction motor does not have an independent field circuit, its mode l will not contain an internal voltage source such as the internal generated voltage in a synchronous machine [2]. It is possible to derive the equivalent circuit of an induction motor from knowledge of transformers and from what we already know about the variation of rotor frequency with speed in induction motors. The induction motor model is shown below. Figure 2- 10 Transformer Model of an Induction Motor [2]