


Chapter 11
Hierarchical Task Network Planning
Lecture slides for
Automated Planning: Theory and Practice
Docsity.com












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
These are the lecture Slides of Automated Planning which includes Domain-Independent Planners, Abstract Search Procedure, Planning Algorithms, Current Set of Solutions, Unpromising Members, Loop Detection, Constraint Violation etc. Key important points are: Hierarchical Task Network Planning, Planning Domain, Vehicles and Routes, Domain-Independent Planner, Control Rules, Problem Reduction, Simple Task Network Planning, States and Operators
Typology: Slides
1 / 32

This page cannot be seen from the preview
Don't miss anything!
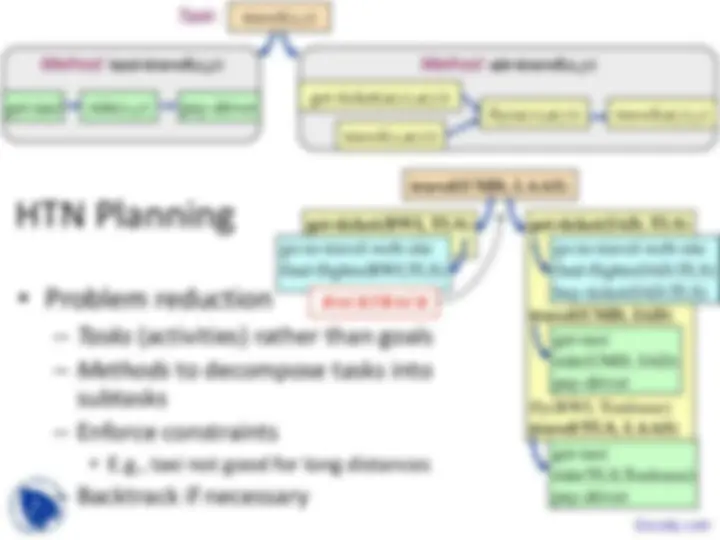
HTN Planning
travel(UMD, LAAS)
get-ticket(IAD, TLS)
travel(UMD, IAD)
fly(BWI, Toulouse) travel(TLS, LAAS) get-taxi ride(TLS,Toulouse) pay-driver
go-to-travel-web-site find-flights(IAD,TLS) buy-ticket(IAD,TLS)
get-taxi ride(UMD, IAD) pay-driver
Task:
Method: taxi-travel( x,y )
get-taxi ride( x , y ) pay-driver
get-ticket(BWI, TLS) go-to-travel-web-site find-flights(BWI,TLS) BACKTRACK
travel( x,y )
Method: air-travel( x,y )
travel(a( y ), y )
get-ticket(a( x ),a( y ))
travel( x ,a( x ))
fly(a( x ),a( y ))
Task:
Method: taxi-travel( x,y )
get-taxi ride( x , y ) pay-driver
travel( x,y )
Method: air-travel( x,y )
travel(a( y ), y )
get-ticket(a( x ),a( y ))
travel( x ,a( x ))
fly(a( x ),a( y ))
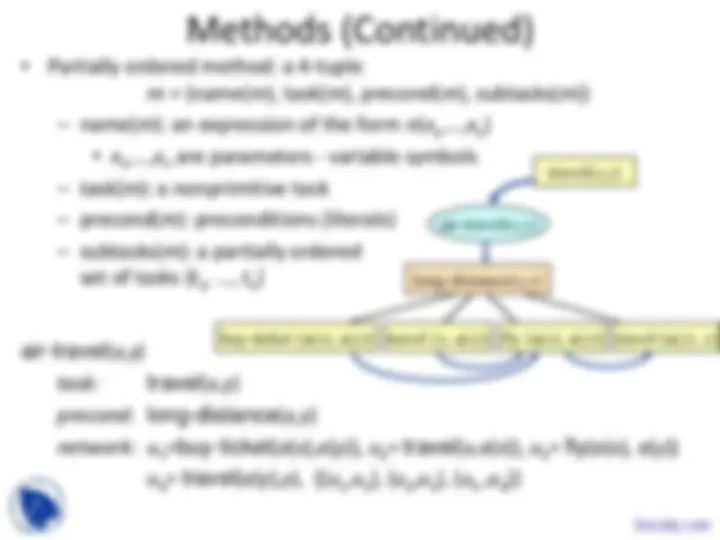
Methods
travel( x,y )
buy-ticket (a( x ), a( y )) travel ( x , a( x )) fly (a( x ), a( y )) travel (a( y ), y )
long-distance( x,y )
air-travel( x,y )
Methods (Continued)
travel( x,y )
buy-ticket (a( x ), a( y )) travel ( x , a( x )) fly (a( x ), a( y )) travel (a( y ), y )
long-distance( x,y )
air-travel( x,y )
Example
in a way that preserves the order of the containers
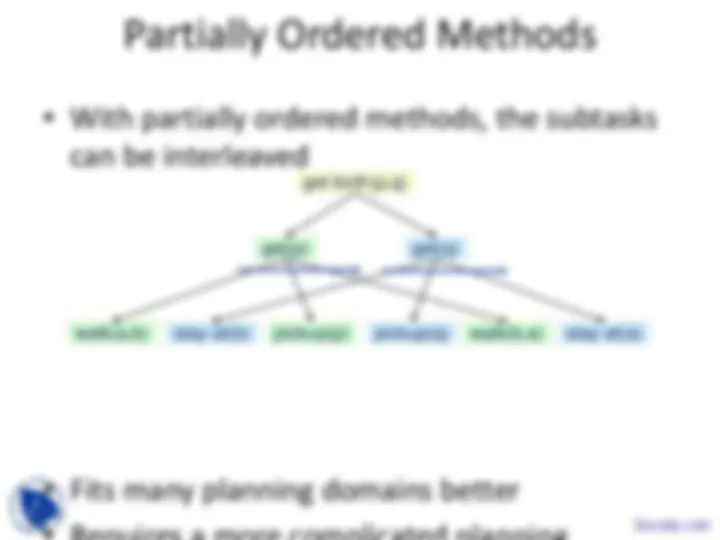
Partial-Order
Formulation
state s ; task list T=( t 1 ,t 2 ,…) action a
state γ( s,a ) ; task list T=(t 2 , …)
task list T=( u 1 ,…,u (^) k ,t 2 ,…)
task list T=( t 1 ,t 2 ,…) method instance m
s 0 s 1 s 2 …
…
task t (^) n
op 1 op 2 Si–1 op (^) i
task t (^0)
Docsity.com
get(p) get(q)
get-both(p,q)
goto(b)
pickup(p) pickup(q)
get-both(p,q)
pickup-both(p,q)
walk(a,b)
goto(a)
walk(b,a)
walk(a,b) pickup(p) walk(b,a) walk(a,b) pickup(p) walk(b,a)
Docsity.com
π={ a 1 …, a (^) k , a }; w' ={t 2 , t 3 , …}
w ={ t 1 ,t 2 ,…} method instance m
w' ={ t 11 ,…,t (^) 1k ,t 2 ,…}
π={ a 1 ,…, a (^) k }; w ={ t 1 ,t 2 , t 3 …} operator instance a
π={ a 1 …, a (^) k , a }; w' ={t 2 , t 3 , …}
π={ a 1 ,…, a (^) k }; w ={ t 1 ,t 2 , t 3 …} operator instance a
w ={ t 1 ,t 2 ,…} method instance m
w' ={ t 11 ,…,t (^) 1k ,t 2 ,…}